Réalisation d'un commutateur audio hi-fi, seconde partie
**********************************************************************************************************
Note importante : ce montage a été
totalement revu et
modifié en octobre 2020. Ceci est donc une page d'archive.
Voir le nouveau montage ici !
**********************************************************************************************************
Passons maintenant au système de commutation proprement dit...
Comment générer les signaux de synchronisation, les enregistrer puis les décoder ensuite ?
Tout d'abord, il est évident qu'il faut utiliser des signaux que le magnétophone n'altèrera pas lors de l'enregistrement ou de la lecture. Des signaux carrés (digitaux) ne seraient pas bien restitués, la distorsion étant trop élevée. Les magnétphones analogiques ne sont pas prévus pour enregistrer ce type de signaux de commutation aux flancs raides. Les risques d'erreurs de lecture et d'interprétation par le commutateur seront alors trop importants. Il faut donc enregistrer des signaux sinusoïdaux, et de fréquences acceptables par le magnétohpone : c'est à dire dans la bande passante de l'appareil.
Ce premier constat étant posé, de quels signaux aura-t-on besoin pour le commutateur?
Deux possibilités se présentaient. La première, enregistrer 16 fréquences différentes correspondant chacune à une commutation, donc une fréquence par sortie commutable. La seconde solution possible était d'enregistrer un signal série, avec des impulsions de synchronisation et des impulsions de données.
La première solution aurait demandé 16 générateurs de fréquences, suffisamment distinctes l'une de l'autre; et surtout 16 filtres à bande étroite pour le décodage. C'est réalisable, mais cela aurait été assez complexe.
La seconde solution ne demande que deux fréquences distinctes et deux filtres. Cela semblait plus réalisable et c'est cette solution qui a été retenue, après quelques essais préalables.
|
|
Les premiers essais de codeur et décodeur, ici au tout début de la réalisation (seul le codeur est câblé au moment de la photo). Le codeur est donc un convertisseur parallèle vers série, et le décodeur fait l'inverse : le signal série est converti vers parallèle. |
|
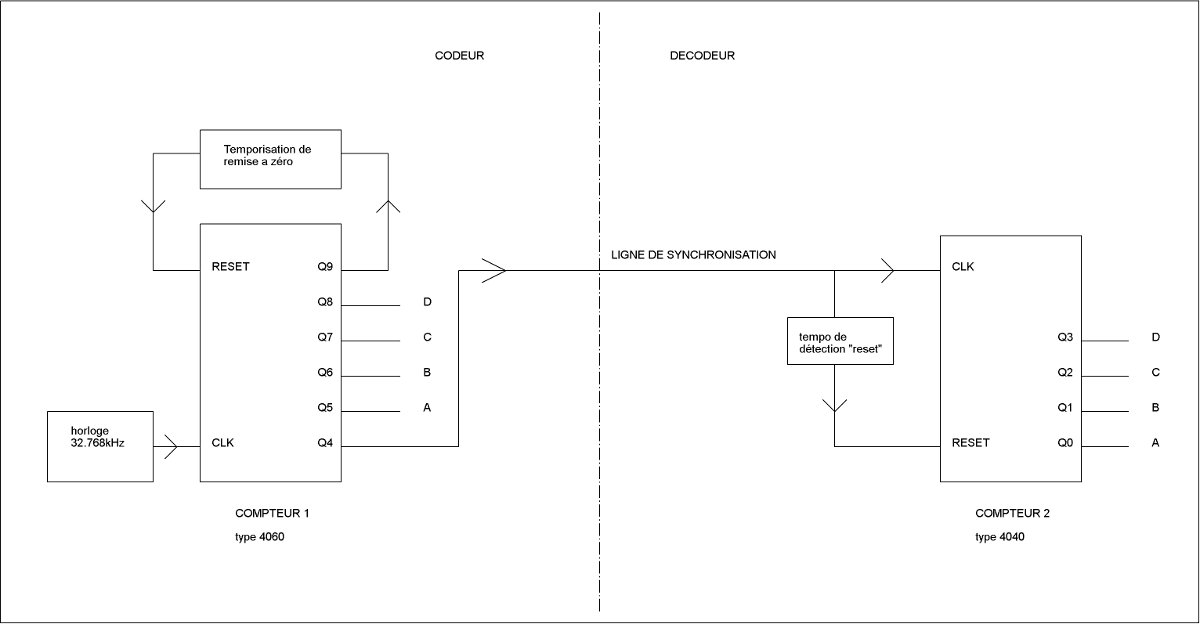
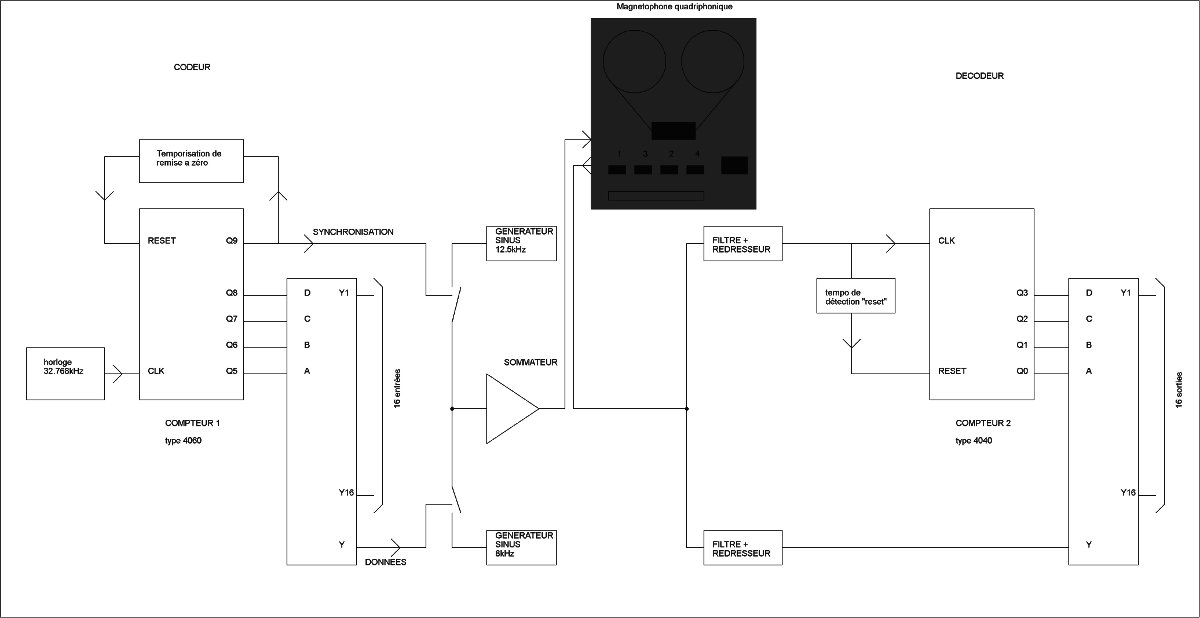
La première chose est d'assurer une parfaite synchronisation des données entre le codeur et le décodeur. Chacun comportant un compteur binaire, il faut les cadencer par les mêmes impulsions et aussi remettre à zéro ces compteurs au même moment. Cela peut se faire par l'usage d'une horloge commune, et du câblage des entrées "reset" des compteurs sur la même impulsion de remise à zéro. Mais ici il n'y aura qu'un seul signal pour la synchronisation... Commant faire pour y passer les impulsions de comptage et de remise à zéro? |
|
|
|
Le compteur maître (côté codeur) est cadencé par des impulsions provenant d'un oscillateur. Une fois arrivé à 16 impulsions, la 5e sortie binaire utilisée (ici Q9) passe à 1. Cette sortie va remettre ce compteur à zéro pendant un certain temps. C'est le rôle de la temporisation. Pendant tout le temps ou cette tempo est active, il n'y a plus d'impulsions de synchronisation qui passent sur la ligne de synchro. Côté décodeur, c'est une autre temporisation, qui va détecter l'absence d'impusions de comptage pendant un certain temps. Si ce temps est dépassé, cette tempo remettra le compteur du décodage à zéro. Quand les impulsions de comptage reviendront, le compteur du décodage recommencera à compter à partir de zéro, en synchronisme avec celui du codeur! |
|
|
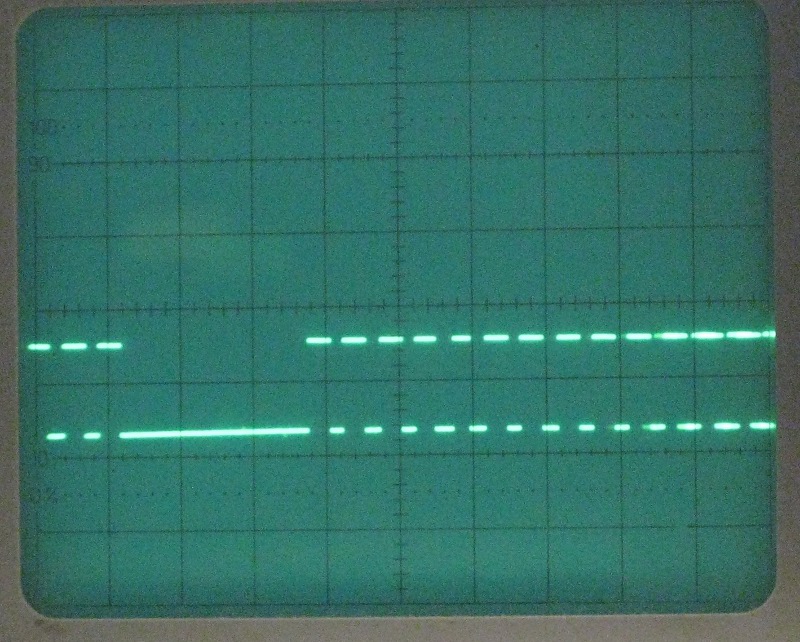
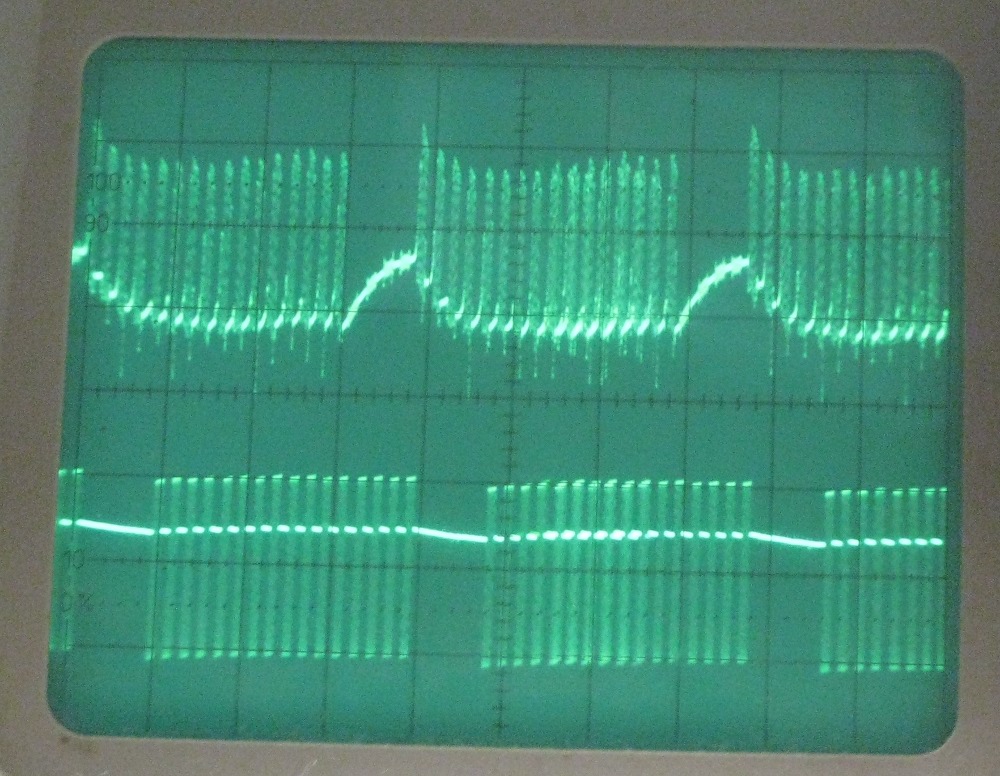
C'est un peu plus compliqué que cela en réalité... La tempo côté décodage est en fait "réarmée" à chaque impulsion. Quand il n'y a plus d'impulsions, cette tempo décompte puis elle active une autre tempo, plus courte, qui va remettre le compteur à zéro. Pour que la tempo de détection de la mise à zéro fonctionne fiablement, il faut que la "pause" générée par le codeur lors de cette mise à zéro ait au moins la longueur de 4 impulsions. Voici l'aspect des impulsions et de la pause marquant la remise à zéro des compteurs. La fréquence des impulsions est de l'ordre de 1kHz. |
|
|
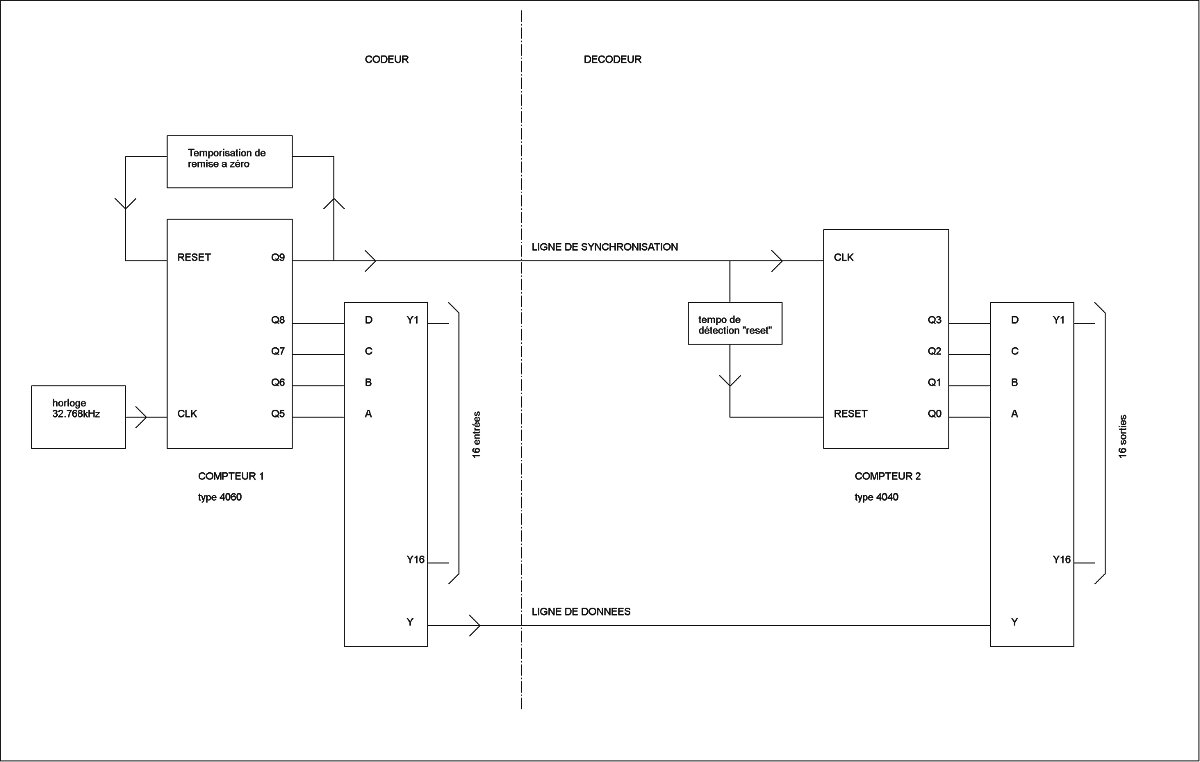
Maintenant que les compteurs sont bien sychronisés, envoyons les 16 signaux. Il suffit côté codage de placer un multiplexeur 16 vers 1 type 4067. Les différentes entrées Y1 à Y16 sont commutées vers la sortie commune Y en fonction de la valeur présente sur les entrées A,B,C,D. Il y a 4 entrées binaires, donc 16 combinaisons. Si cs 4 entrées valent toutes 0, c'est Y1 qui est envoyée vers Y, et ainsi de suite... Côté décodeur, c'est avec un démultiplexeur qu'on va retrouver les données. Son entrée commune est reliée à la sortie commune du multiplexeur du codeur. Comme le compteur binaire côté décodage est synchrone avec celui du codage, le mutiplexeur et le démultiplexeur reçoivent donc le même code sur leurs entrées A,B,C,D. Ainsi les données arrivant sur une des entrées du multiplexeur côté codeur se retrouvent bien sur la sortie correspondante du démultiplexeur. On a ainsi réalisé une liaison série assez simple : les données sont envoyées les unes après les autres sur la ligne de données. |
|
Les données en sortie du décodeur ne seront pas stables pour autant, et ne seront présentes que pendant un moment: quand la sortie du compteur aura la valeur binaire correspondante. Le démultiplexeur devra donc être pourvu de mémoires, qui maintiendront les 16 sorties dans leur état pendant tout le reste du cycle. Ceci sera réalisé avec des registres type 4099. A ce stade, on a bien des données qui sont envoyées depuis le codeur vers le décodeur. On voit ici que deux liaisons sont nécessaires : la synchronisation et les données. Voyons maintenant comment les assembler en un seul signal, qui pourra être enregistré sur bande. |
|
|
|
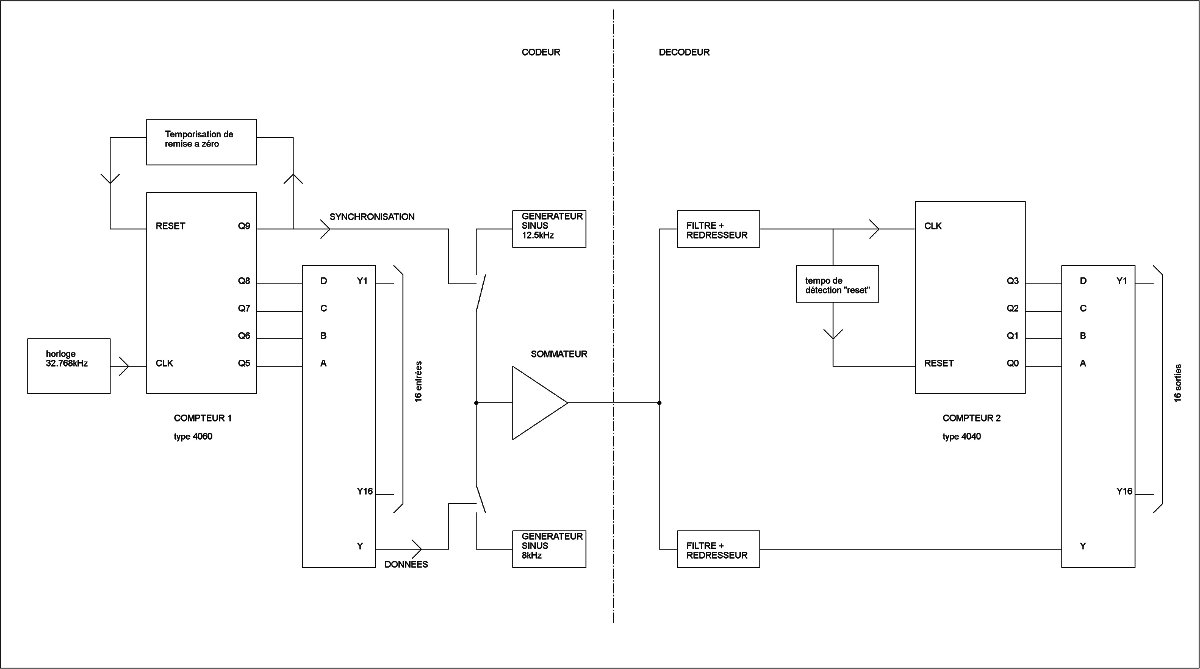
Comme énoncé en début de cettte page, les données enregistrées devront être des signaux sinusoïdaux. Si on veut rassembler les signaux de synchro et de données, il va falloir choisir deux fréquences, enregistrables, et suffisamment différentes que pour être séparées au décodage. De plus, le signal carré de synchronisation a une fréquence fondamentale de 1.024kHz (horloge de 32.768kHz divisée par 32). Ces impulsions devront "contenir" un signal sinus qui devra être détecté. Il faut donc que la fréquence de ce signal soit suffisament haute que pour qu'à chaque impulsion de synchro il y ait au moins 4 périodes complètes de signal sinus présentes "dans" l'impulsion. Pareil pour les données, mais ici la fréquence est moitié moins élevée que la synchro (division par le compteur binaire). |
|
|
Le choix s'est porté sur 12.5kHz pour la synchro et 8kHz pour les données. Ces deux fréquences sont suffisamment éloignées pour être discriminées par des filtres pas trop complexes, et sont également largement dans la bande passante du magnétophone. Ces deux fréquences seront donc mélangées et envoyées en un seul signal vers le décodeur. Coté décodeur, deux filtres suivis de redresseurs restitueront les deux signaux bien séparés. |
|
|
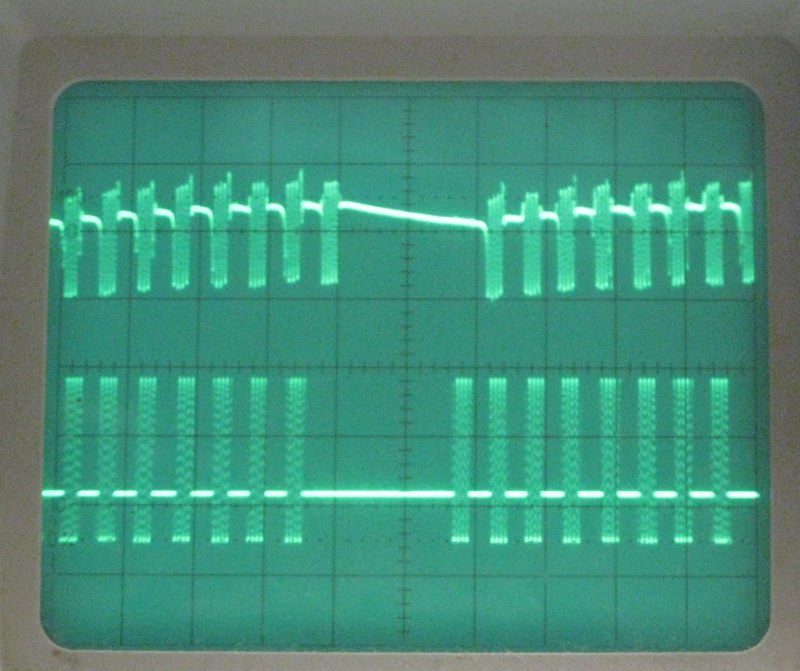
Premiers essais d'enregistrement des 16 pulses de synchronisation. Pas mal de distorsion, il faut améliorer cela... Le signal reçu du magnétophone est la piste du dessus et le signal envoyé est la piste du dessous. Le décalage temporel est logique: il dépend de la vitesse de défilement de la bande et de l'écartement entre la tête d'enregistrement et celle de lecture. |
|
|
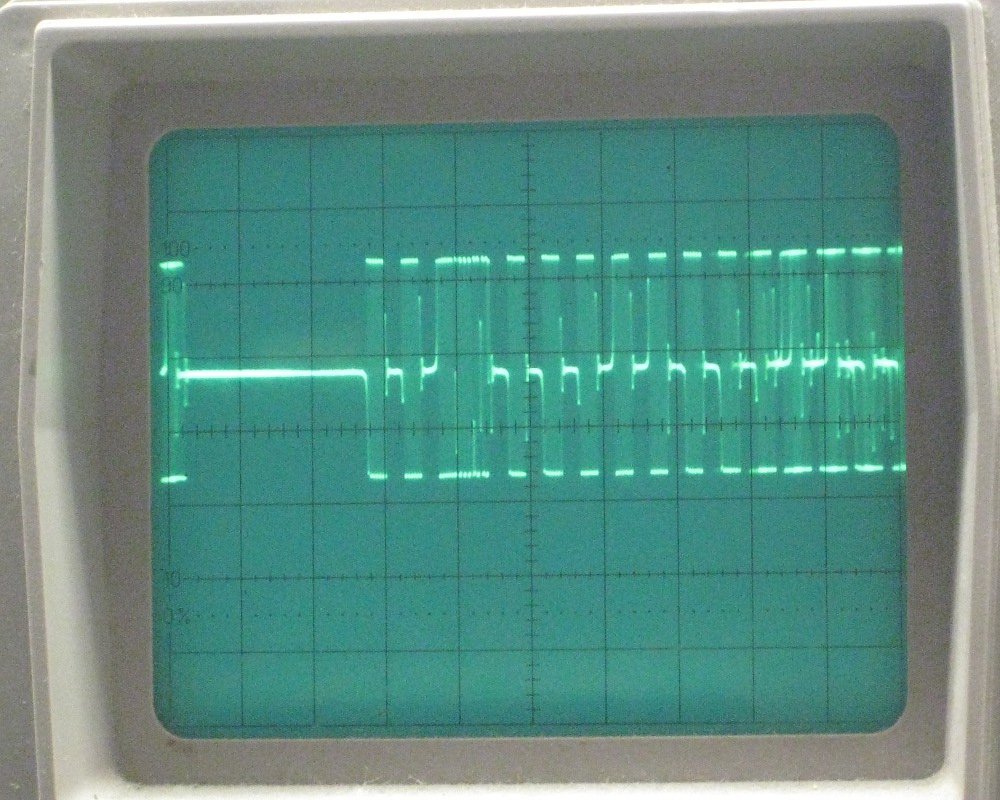
Cela devient mieux ! Il faut enregistrer avec un niveau assez faible (largement en dessous du niveau "O dB" des vu-mètres), pour éviter la saturation de la bande. |
|
|
Une fois les bons niveaux d'enregistrement et de reproduction trouvés, les signaux deviennent stables et lisibles. Ici on voit les 16 impulsions de synchro, et aussi que la voie N° 3 est commutée. |
|
Voila pour la partie un peu théorique, et pour les essais. L'amusant peut alors commencer : la réalisation ! |
|
|
© Radiocollection.be, Thierry Magis 2013-2020 |
|

Troisième partie de cette réalisation