Automatismes construits par la M.B.L.E.
Note importante au sujet des documents et images présentés ici !
Clic sur les images pour agrandir.
Les années 60 ont vu les débuts de l'automatisme et de la régulation en milieu industriel.
C'est principalement avec la généralisation des semi-conducteurs que cette évolution aura été possible. Il était bien sur faisable de créer des automatismes avec la technologie des lampes (quelques illustrations ci-dessous), mais leur encombrement, consommation et durée de vie rendait cela assez lourd et coûteux.
L'usage des semi-conducteurs va permettre la création de capteurs, de calculateurs et de régulateurs performants. Voici quelques exemples de productions de la M.B.L.E. dans ce domaine.
|
|
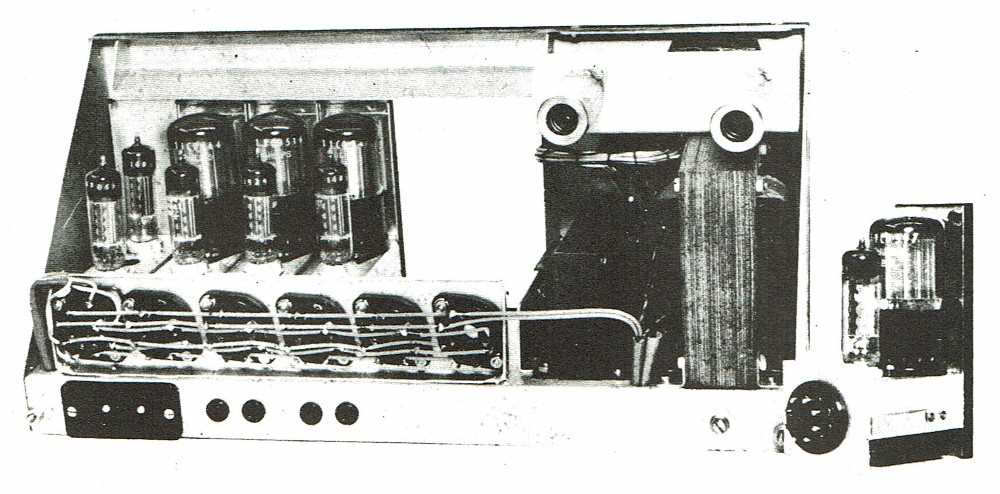
Fin des années 50, unité de comptage. Ce matériel est intégralement à lampes, y compris les lampes spéciales indicatrices type E1T. |
|
|
L'appareil de comptage à plusieurs décimales, vu de derrière. Le câblage est conséquent. Un des modules est posé à côté du châssis. |
|
|
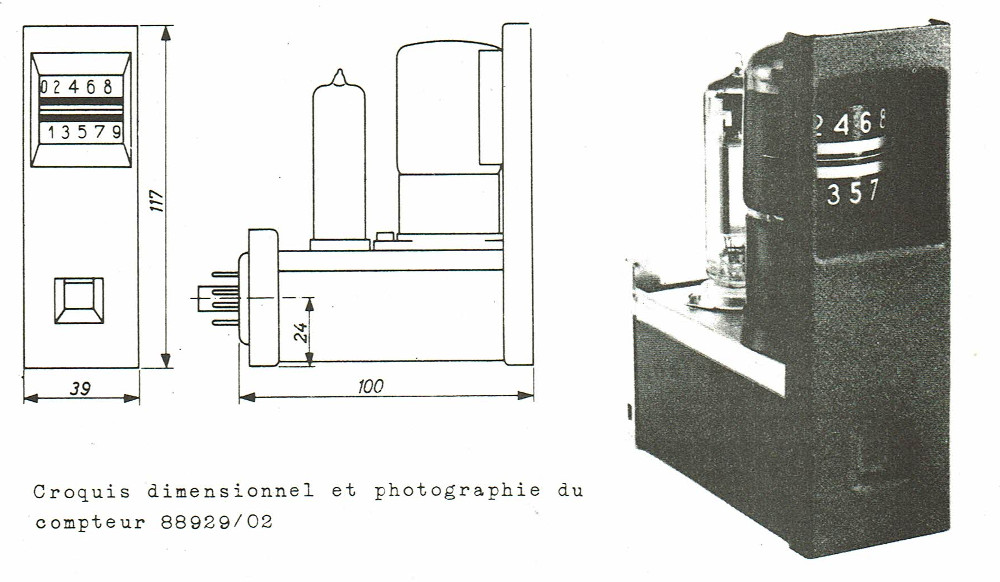
L'unité de comptage avec son tube indicateur. |
|
|
Un voltmètre digital en 1960. Celui-ci affiche la mesure sur des afficheurs nixie type Z510M, dont le pilotage est assuré par des thyratrons Z70U. Ces thyratrons permettaient également la réalisation des relais à seuils sur des mesures analogiques, et de détecteurs capacitifs. Les seuils sur mesures analogiques font partie des fonctions utilisées en automatismes industriels. |
|
|
En 1962, les relais statiques "Norbit" apparaissent. Il s'agit d'ensembles de logique combinatoire, à transistors, montés dans des modules en plastique. Il ne s'agit pas encore de circuits intégrés, mais ici d'unités pré-assemblées et prêtes à l'emploi, avec des fils permettant l'interconnexion de ces unités entre elles. Chaque unité avait une fonction particulière, et était repéré par un point de couleur. Ces modules fonctionnaient sous 24V DC. Cette technologie n'étant plus employée aujourd'hui, seuls quelques modules sont montrés ci-dessous, pour information. |
|
|
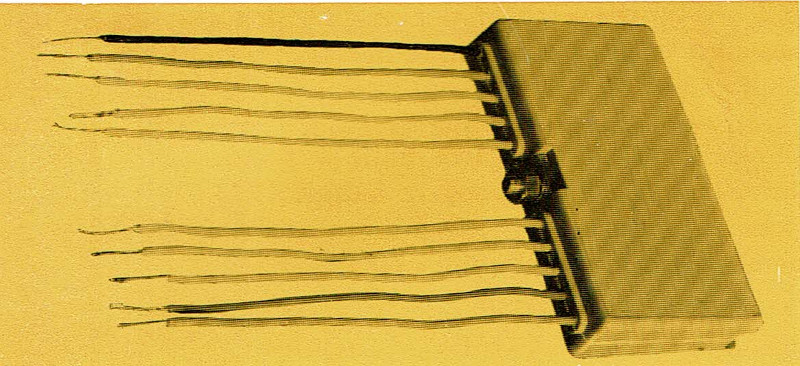
Unité de base, à fils de connexion. Ce type d'unité pouvait réaliser différentes fonctions, selon le modèle (fonction NI, inverseur, émetteur-suiveur, ampli...). |
|
|
Unité à moyenne puissance, permettant un courant de sortie plus élevé qu'une unité "ordinaire"; |
|
|
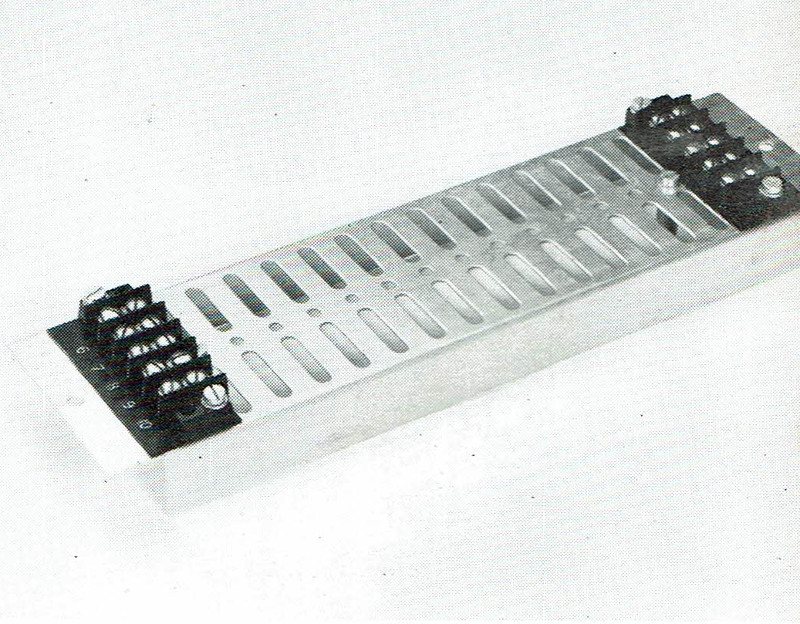
Châssis pour montage des unités de base, avec borniers de connexion. |
|
|
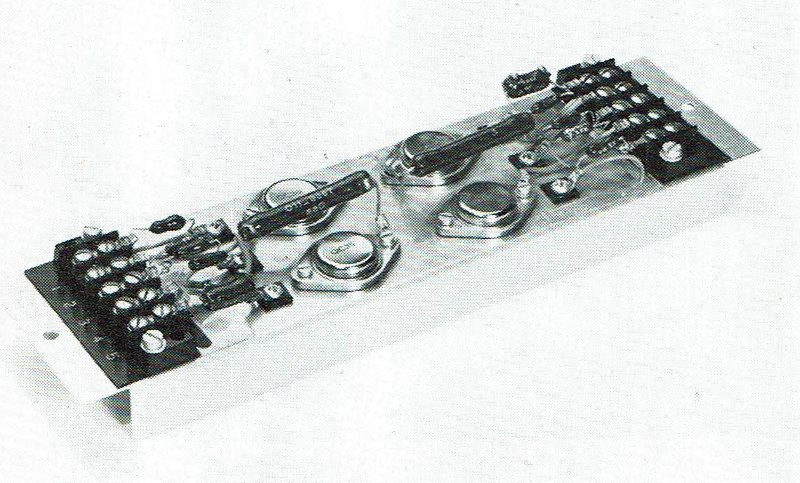
Double unité de puissance. Ceci permet de piloter, par une sortie d'un module, une charge plus puissante (lampe, relais, klaxon...). |
|
|
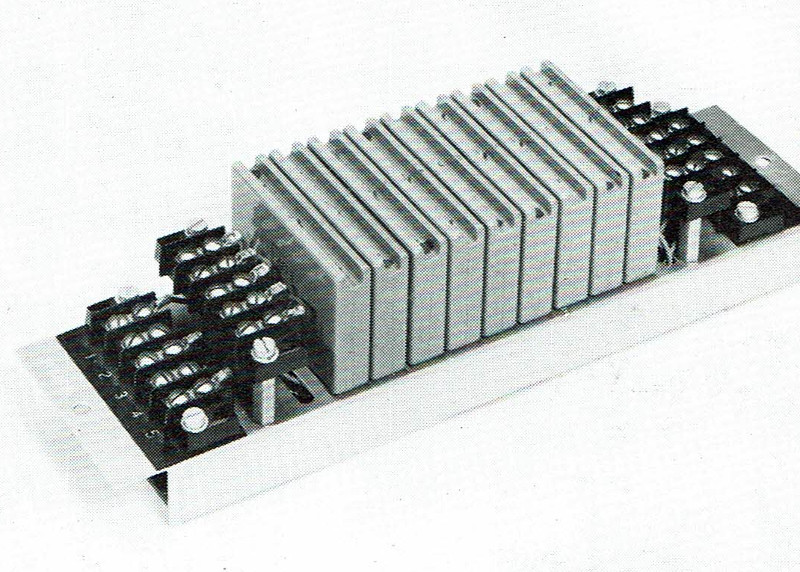
Unité de comptage triple, chaque compteur étant composé de trois modules de comptage (bistable), pouvant être cascadés entre eux. |
|
|
Module de temporisation permettant des retards de 0.1 à 60 secondes. |
|
|
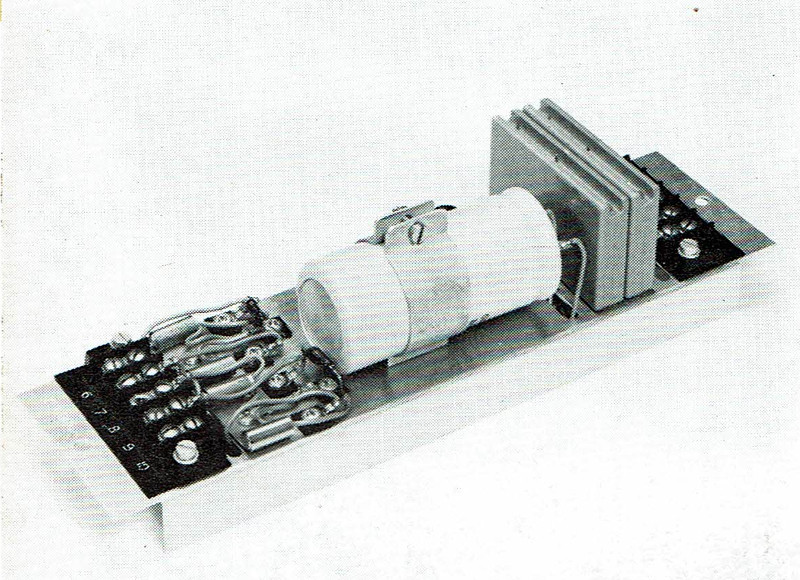
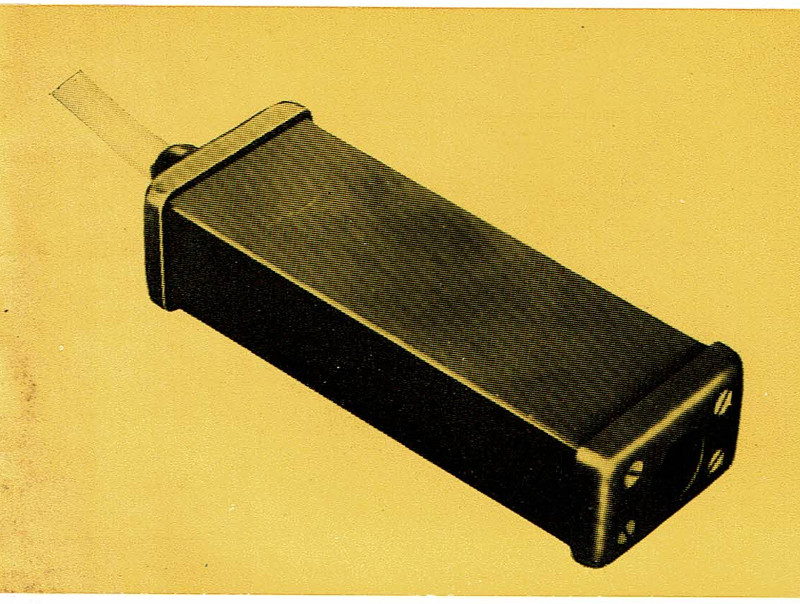
Cellule de détection photoélectrique, en boîtier moulé et avec lentille réglable (1962). |
|
|
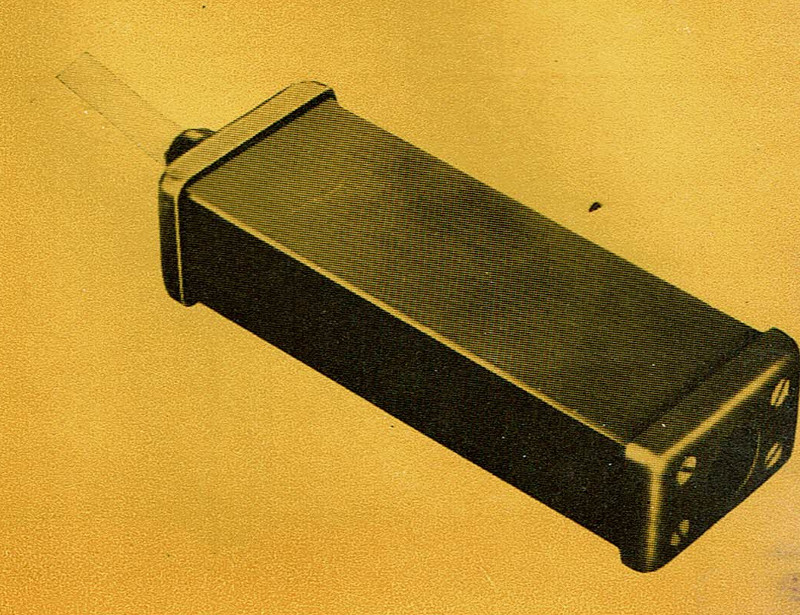
Source lumineuse pour la cellule photoélectrique (1962). Les LED n'étaient pas encore découvertes, il était fait emploi d'un ampoule à incandescence. |
|
|
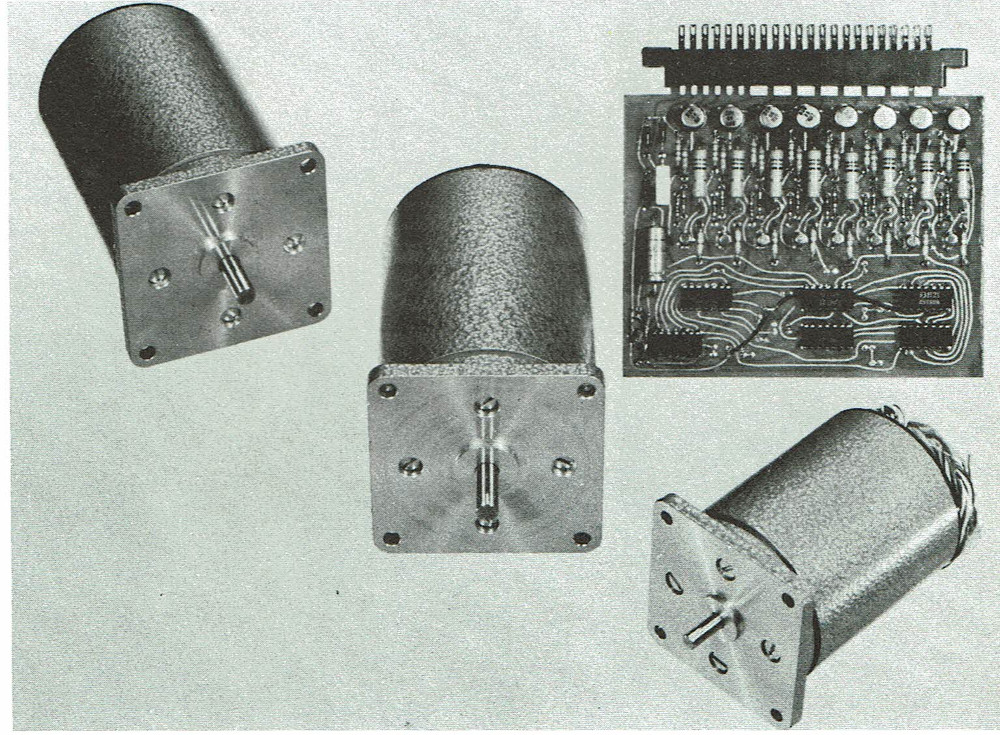
Dans les années 60 apparaît la technique des moteurs pas-à-pas. Ces moteurs permettent de se positionner très précisément, et de rester "statiques" sur une position donnée. Leur vitesse peut être contrôlée. Ces moteurs vont permettre le développement de machines complexes, puis des robots. La M.B.L.E. a développé ces moteurs, et bien entendu les électroniques de pilotage, à partir de 1964. |
|
|
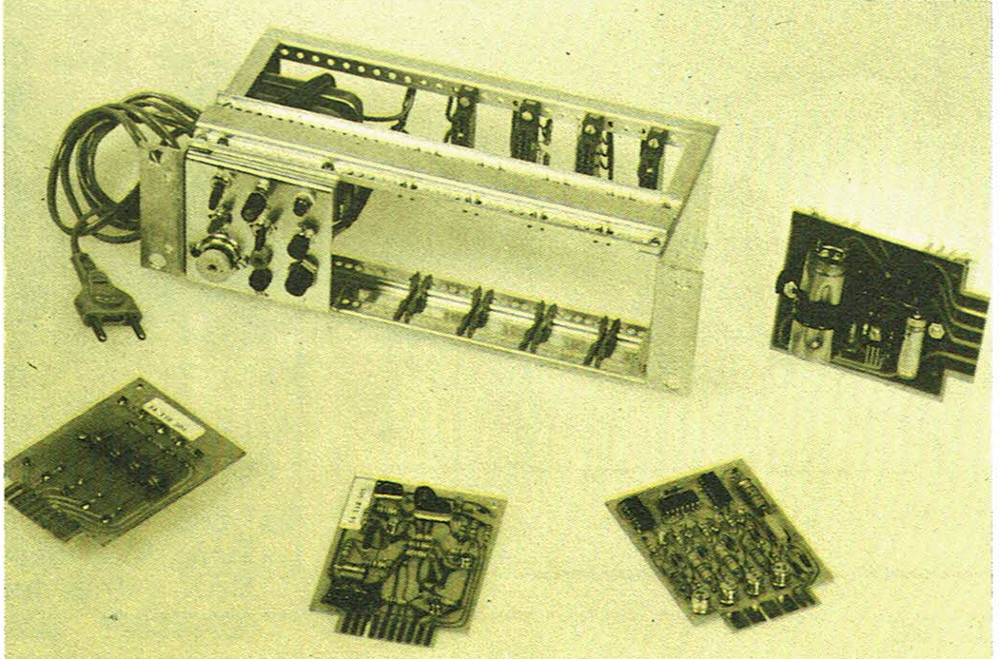
Un rack destiné à contenir les modules électroniques de pilotage de moteurs pas-à-pas. |
|
|
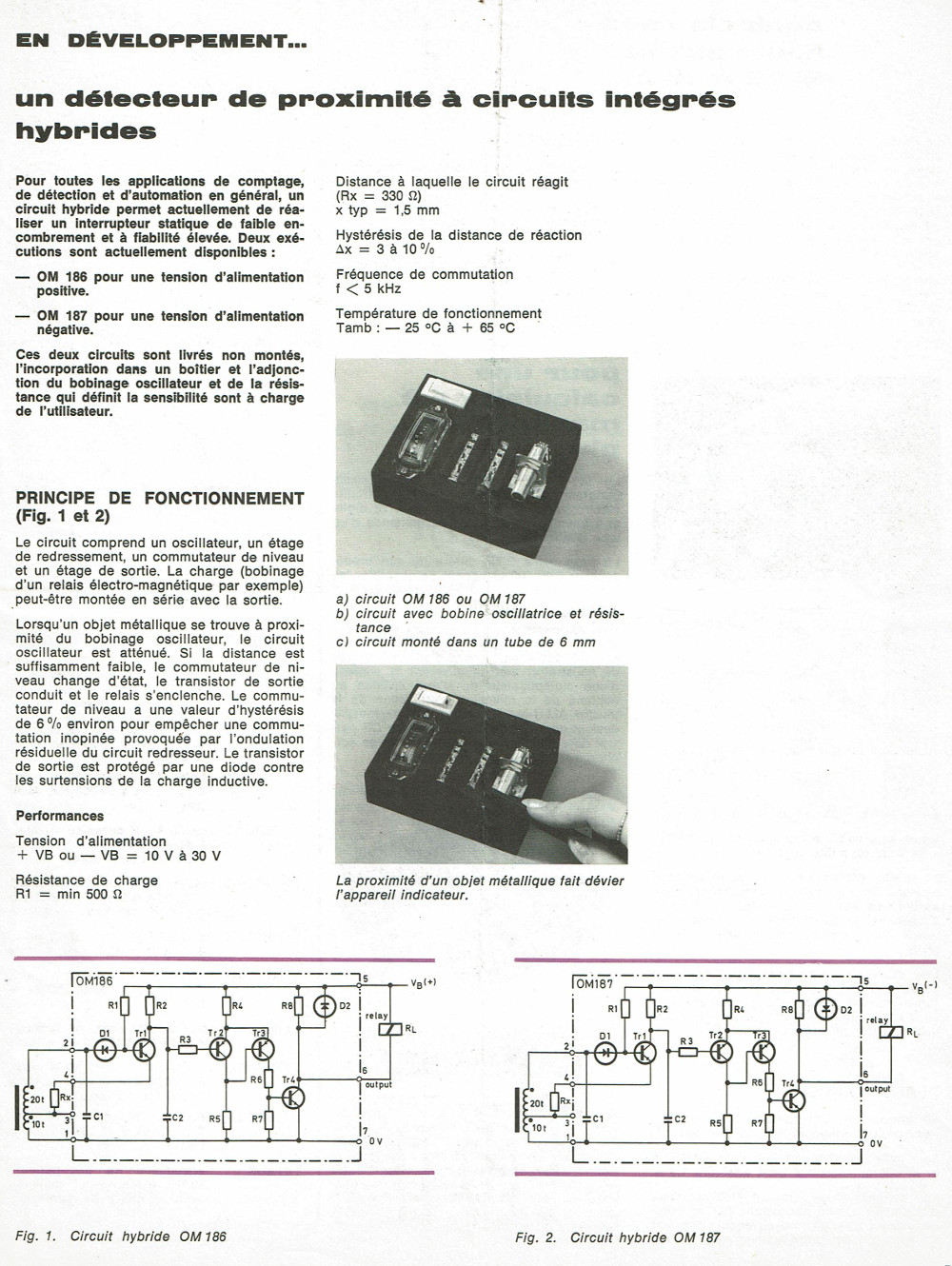
En 1974, le développement des détecteurs de proximité inductifs. Ces détecteurs sont encore utilisés en industrie aujourd'hui et sont toujours basés sur le même principe de fonctionnement. |
|
|
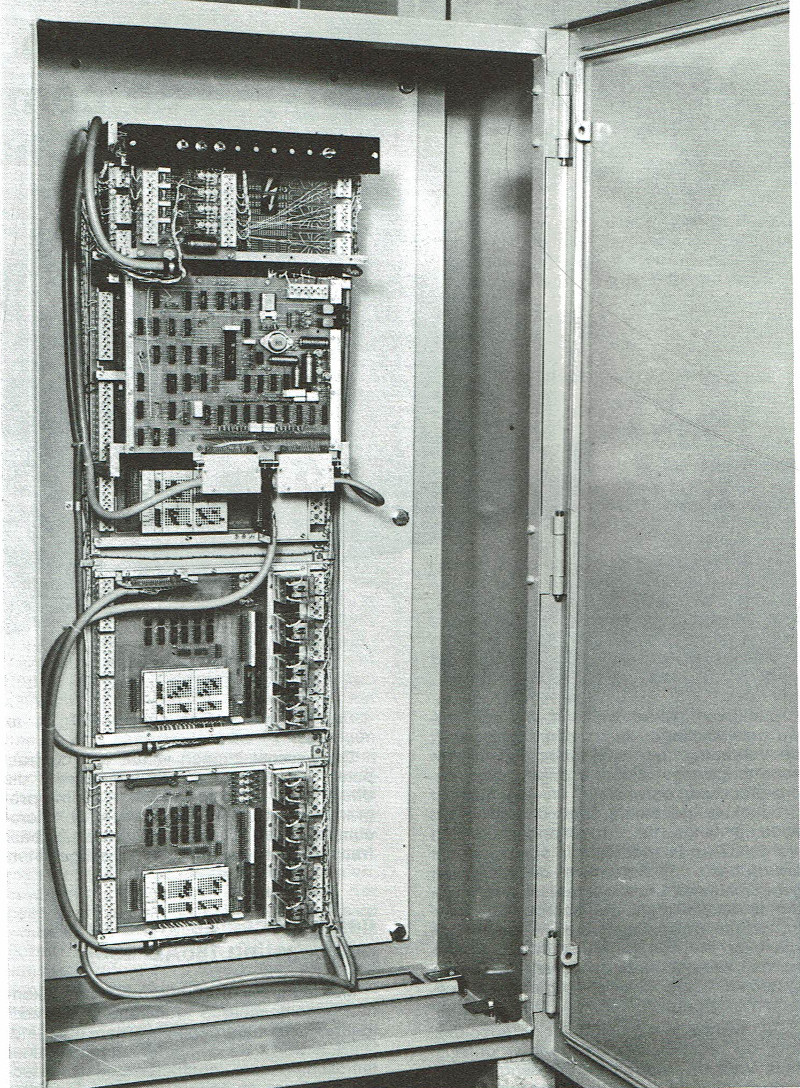
En 1975, le développement des calculateurs industriels, plus tard nommés automates programmables. |
|
|
Une armoire électrique équipée de matériel d'automation programmable, en 1975. |




© Radiocollection.be, Thierry Magis 2016-2018